











在关键词搜索内找到47项结果。
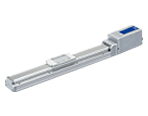
免电池 绝对增量型
电动滑台/高精度型 LESYH□G
电动执行器/电缸 » 无电池、绝对增量编码器型
-
・可缩短工作节拍时间
・工作节拍时间:与以前相比削减39%(0.37s←0.61s)
・加減速度:10000mm/s2(是以前型号的200%)
・最大速度:800mm/s(与以前比提高了200%)
・带免电池绝对增量型编码器
电源复位时,可以从停止位置重新启动
・对应控制器/驱动器:JXC□LEC□
| 规格 | 系列 | 行程 (mm) | 可搬运重量 (kg) 水平 | 可搬运重量 (kg) 垂直 | 速度 (mm/s) | 丝杆导程(mm) |
|---|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机 DC24V) | LESYH8G | 50、75 | 最大2 | 最大6 | 最大800 | 2.5、5、10 |
| 免电池 绝对增量型编码器 (步进电机 DC24V) | LESYH16G | 50、100 | 最大8 | 最大12 | 最大800 | 6、12 |
| 免电池 绝对增量型编码器 (步进电机 DC24V) | LESYH25G | 50、100、150 | 最大12 | 最大20 | 最大800 | 8、16 |
滑动型楔形凸轮驱动方式 MHK2
摆动气缸/气爪 » 气爪(平行开闭型)
-
・采用楔形凸轮驱动方式。
・采用滑动型导轨,刚性高。
・防尘、防滴、耐外力、耐环境,可用于多种用途。
・可根据环境选择防尘罩材质(氯丁橡胶、氟橡胶、硅胶),且可选择不锈钢手指(SUS304)。
・可选择长行程。
| 系列 | 气缸内径(mm) |
|---|---|
| MHK2 | 12,16,20,25 |
| MHKL2 | 12,16,20,25 |

滑动导轨方式3爪型气爪 MHS3
摆动气缸/气爪 » 气爪(平行开闭型)
-
・采用楔形凸轮构造,高度方向尺寸小且重量轻。
・适合压入等承受外力的作业。
・重复精度 ±0.01mm。
・长行程:行程为标准品的2倍以上。
・可夹持圆筒形工件。
・带通孔及中心推杆,能够可靠地与工件分离。
| 型号 | 系列 | 气缸内径(mm) |
|---|---|---|
| 双作用型 | MHS3 | 16,20,25,32,40,50,63,80,100,125 |
| 单作用型 | MHS3-X84 | 16,20,25,32,40,50,63 |
| 防尘罩型 | MHSJ3 | 16,20,25,32,40,50,63,80 |
| 通孔型 | MHSH3 | 16,20,25,32,40,50,63,80 |
| 防尘罩+通孔型 | MHSHJ | 16,20,25,32,40,50,63,80 |
| 长行程型 | MHSL3 | 16,20,25,32,40,50,63,80,100,125 |
耐环境3爪型气爪 MHS3-X6708□
摆动气缸/气爪 » 气爪(平行开闭型)
-
・对应水滴、粉尘环境
10倍以上的耐久性(在水滴飞散环境中,与标准品比较)
・可根据用途(环境)选择防尘圈、润滑油护圈
・连接部件位置的再现性提升
・可安装无触点磁性开关
适合磁性开关:D-M9□型
| 形式 | 系列 | 缸筒内径(mm) |
|---|---|---|
| 耐环境 | MHS3-X6708□ | 32、63 |
协作机器人专用气爪/3爪型 RMHS3
摆动气缸/气爪 » 协作机器人用气爪摆动气缸/气爪 » 气爪(平行开闭型)
协作机器人专用夹爪 » 气爪

-
・3种快换盘可供选择
操作简单,易于更换工具
夹紧型(手动式)、一键推压式(手动式)[New]、
自动型 [New]、工具托架 [New]
・将气爪及其驱动元件集成为1个单元
仅需连接1根供气管和1根电缆,即可动作
内置电磁阀、带消声器的节流阀、磁性开关、管接头等
・对应12家公司的协作机器人
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC,
YASKAWA Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA,
DOOSAN ROBOTICS,SIASUN, JAKA, AUBO, ABB
・空气消耗量最大减少80%
・可以临时防止工件掉落
・适合圆筒形工件的轴向夹持
| 系列 | 爪数 | 外径夹持力(N) | 内径夹持力(N) | 开闭行程(两侧)(mm) |
|---|---|---|---|---|
| RMHS3 | 3 | 118 | 130 | 8 |


