











在关键词搜索内找到47项结果。
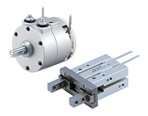
协作机器人专用气爪(优傲机器人用) JMHZ2-X7400B
摆动气缸/气爪 » 协作机器人专用气爪
-
・Plug &Play,可立即使用
对应URCap,编程简单
・空气驱动,体积小重量轻,但夹持力大
・配备1根供气管,连接M8电气配线接头即可动作
・将电磁阀、速度调节机构一体化
・安装规格:ISO9409-1-50-4-M6
| 形式 | 系列 | 缸径(mm) |
|---|---|---|
| 协作机器人用 | JMHZ2-16D-X7400B | 16 |


协作机器人用气爪单元(安川电机、MOTOMAN-HC用) JMHZ2-X7400B-DTP/HC10DT/HC10
摆动气缸/气爪 » 协作机器人用气爪
-
・采用空气驱动,体积小、重量轻,夹持力更高
・只需连接1跟供气管和M12电气配线电缆即可工作
・电磁阀、速度调节机构、磁性开关一体化
・导向机构一体化构造,实现高刚性、高精度
采用高精度直线导轨 重复精度:±0.01mm
采用更高等级的直线导轨,刚性提高
・分采用分离式保护罩气爪的维护更容易
| 形式 | 系列 | 缸筒内径(mm) |
|---|---|---|
| 协作机器人用 | JMHZ2-16D-X7400B-DTP JMHZ2-16D-X7400B-HC10DT JMHZ2-16D-X7400B-HC10 | 16 |

薄型气爪 MHF2
摆动气缸/气爪 » 气爪(平行开闭型)
-
・追加ø25, ø32 [New]
高刚性,夹持点距离 最大170mm(ø32, 0.4MPa的场合)
・高度最大降低66% 工件搬运时的力矩减轻
72.8mm → 25mm(与本公司有相同夹持力的MHZ2系列相比)
・3种行程长度可供选择
短行程・中行程・长行程
| 系列 | 缸径(mm) |
|---|---|
| MHF2 | 8,12,16,20,25,32 |
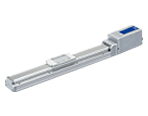
协作机器人专用气爪/长行程型 RMHF2
摆动气缸/气爪 » 协作机器人用气爪摆动气缸/气爪 » 气爪(平行开闭型)
协作机器人专用夹爪 » 气爪

-
・3种快换盘可供选择
操作简单,易于更换工具
夹紧型(手动式)、一键推压式(手动式)[New]、
自动型 [New]、工具托架 [New]
・将气爪及其驱动元件集成为1个单元
仅需连接1根供气管和1根电缆,即可动作
内置电磁阀、带消声器的节流阀、磁性开关、管接头等
・对应12家公司的协作机器人
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC,
YASKAWA Electric, Mitsubishi Electric, HAN'S ROBOT, KUKA,
DOOSAN ROBOTICS,SIASUN, JAKA, AUBO, ABB
・空气消耗量最大减少80%
・可以临时防止工件掉落
・64mm的长行程可对应各种工件
・高度尺寸减小约35%(与标准型相比)
・可安装执行器位置传感器 (可选项)
协作机器人制造商:适用于UNIVERSAL ROBOTS、发那科
| 系列 | 爪数 | 外径夹持力(N) | 内径夹持力(N) | 开闭行程(两侧)(mm) |
|---|---|---|---|---|
| RMHF2 | 2 | 90 | 90 | 64 |

协作机器人用气爪单元
适合卡瓦达机器人、NEXTAGE JMHZ2-X7500-KR
摆动气缸/气爪 » 协作机器人用气爪
-
・采用空气驱动,体积小重量轻,但夹持力大
・气爪导向机构一体化,保证了高刚性、高精度
・采用高刚性直线导轨
・重复精度:±0.01mm
・速度调节机构一体化
・采用分离式防护罩,可对气爪进行维护
・可选择是否带有连接件、防护罩、磁性开关
・安装规格:符合ISO9409-1-50-4-M6标准
| 形式 | 系列 | 缸筒内径(mm) |
|---|---|---|
| 协作机器人用 | JMHZ2-X7500-KR | 16 |


