











在关键词搜索内找到47项结果。
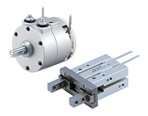
AHC系统/自动工具更换系统 MA
摆动气缸/气爪 » 气爪(支点开闭型)
| 系列 | 定位方式 | 操作方法 |
|---|---|---|
| MA210 | 球式连接 | 单作用 |
| MA310 | 球式连接 | 单作用 |
| MA311 | 球式连接 | 双作用 |
| MA320 | 弧形连接 | 单作用 |
| MA321 | 弧形连接 | 双作用 |

气爪/手指可更换 MHF2-X7076A
摆动气缸/气爪 » 气爪(平行开闭型)
-
・机器人的自动工具更换用单元
・配线、配管集中于气爪的本体(机器人侧)
・避免更换工具时的电气接触不良、配管连接异常造成的空气泄漏等问题
・1台机器人可对应各种工件
削减连接部件的更换作业及位置调整作业,提高生产性
・全场缩短82%以上
・质量减小69%以上(485g→150g)
| 形式 | 系列 | 缸筒内径(mm) |
|---|---|---|
| 带手指更换功能 | MHF2-X7076A | 8 |
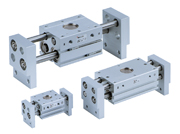
平行开闭型气爪/宽型 MHL2
摆动气缸/气爪 » 气爪(平行开闭型)
-
・重量轻 重量最多削减10%:585g →525g。
主体及内部的构造变更使质量减小。
・内置防尘构造(标准配置)。
应对粉尘环境(订制规格:-X85, -X86□)。
・长行程 1只气爪可对应多种工件尺寸。
・采用双活塞构造,外形紧凑夹持力大。
・可直接安装小型磁性开关。
| 系列 | 气缸内径(mm) |
|---|---|
| MHL2-Z | 10,16,20,25 |
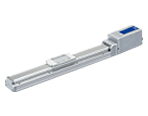
免电池 绝对增量型编码器
电动滑台/薄型 LES
电动执行器/电缸 » 免电池、绝对增量型编码器
| 规格 | 系列 | 行程 (mm) | 可搬运重量 (kg) 水平 | 可搬运重量 (kg) 垂直 | 速度 (mm/s) | 丝杆导程 (mm) |
|---|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机DC24V) | LES25□ | 30、50、75、100、125、150 | 最大5 | 最大5 | 最大400 | 8、16 |

免电池 绝对增量型编码器
电动滑台/高刚性型 LESH
电动执行器/电缸 » 免电池、绝对增量型编码器
| 规格 | 系列 | 行程 (mm) | 可搬运质量 (kg) 水平 | 可搬运质量 (kg) 垂直 | 速度 (mm/s) | 螺纹导程 (mm) |
|---|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机DC24V) | LESH25□ | 50、100、150 | 最大12 | 最大4 | 最大400 | 8、16 |
协作机器人用 磁力吸附单元
适合川崎重工duAro1、2系列 JMHZ2-X7500-KA
摆动气缸/气爪 » 协作机器人用气爪
-
・空气驱动,体积小、重量轻但夹持力大
・导向机构一体化构造,实现了高刚性、高精度
采用高精度直线导轨:重复定位精度:±0.01mm
采用更高等级的直线导轨:刚性提高
・速度调节机构一体化
・采用分离式防护罩,易于维护夹爪
・可选择是否带安装件、防护罩、磁性开关
| 形式 | 系列 | 缸筒内径(mm) |
|---|---|---|
| 协作机器人用 | JMHZ2-X7400-KA | 16 |


