











在关键词搜索内找到650项结果。

温控器/激光用小型双通道型/基本型 HRLE
温控器 » 温控器(循环液温控装置)温控器 » 温控器(循环液温控装置)Dual Channel Thermo chiller for Lasers zh-cn

| 系列 | 设定温度范围 | 冷却能力 (通道1,、2总共) | 温度稳定性 | 冷却方式 | 循环液 |
|---|---|---|---|---|---|
| HRLE050-A | 通道1:15~25℃ 通道2:通道1温度 + 0~15℃ | 4.8kW/5.8k (50Hz/60Hz) | 通道1:±0.1 通道2:±0.5 | 风冷 冷冻式 | 清水、脱离子水(纯水) |
| HRLE050-W | 通道1:15~25℃ 通道2:通道1温度 + 0~15℃ | 4.8kW/5.8k (50Hz/60Hz) | 通道1:±0.1 通道2:±0.5 | 水冷 冷冻式 | 清水、脱离子水(纯水) |
| HRLE090-A | 通道1:15~25℃ 通道2:通道1温度 + 0~15℃ | 8.0kW/9.5kW (50Hz/60Hz) | 通道1:±0.1 通道2:±0.5 | 风冷 冷冻式 | 清水、脱离子水(纯水) |
| HRLE090-W | 通道1:9kw,19kW,26kW 通道2:1.0kW(最大1.5kW) | 9.5kW/11.0kW (50Hz/60Hz) | 通道1:±0.1 通道2:±0.5 | 水冷 冷冻式 | 清水、脱离子水(纯水) |


控制器 步信息输入型 LECA6
电动执行器/电缸 » 控制器/驱动器
| 形式 | 系列 | 对应电机 | 电源电压 | 并行输入 | 并行输出 | 定位 模块 点数 |
|---|---|---|---|---|---|---|
| 步信息输入型 | LECA6 | 伺服电机 (DC24V) | DC24V ±10% | 输入点数11点 (光电耦合器绝缘) | 输出点数13点 (光电耦合器绝缘) | 64点 |
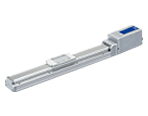
免电池 绝对增量型编码器
电动滑台/高刚性型 LESH
电动执行器/电缸 » 免电池、绝对增量型编码器
| 规格 | 系列 | 行程 (mm) | 可搬运质量 (kg) 水平 | 可搬运质量 (kg) 垂直 | 速度 (mm/s) | 螺纹导程 (mm) |
|---|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机DC24V) | LESH25□ | 50、100、150 | 最大12 | 最大4 | 最大400 | 8、16 |
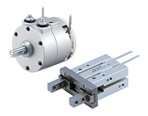
协作机器人用 磁力吸附单元
适合川崎重工duAro1、2系列 JMHZ2-X7500-KA
摆动气缸/气爪 » 协作机器人用气爪
-
・空气驱动,体积小、重量轻但夹持力大
・导向机构一体化构造,实现了高刚性、高精度
采用高精度直线导轨:重复定位精度:±0.01mm
采用更高等级的直线导轨:刚性提高
・速度调节机构一体化
・采用分离式防护罩,易于维护夹爪
・可选择是否带安装件、防护罩、磁性开关
| 形式 | 系列 | 缸筒内径(mm) |
|---|---|---|
| 协作机器人用 | JMHZ2-X7400-KA | 16 |

小型夹紧缸 CKZM16-X2800/X2900
气缸 » 夹紧气缸
-
・体积小 宽20mm,重量轻 质量250g
・最大夹紧力 200N,最大保持力 300N
・平滑的夹紧特性。
工件厚度大至3.5mm时也能保持稳定的夹紧力输出。
・单元化结构,减少了设计组装工时。
夹紧缸上追加了臂组件和安装组件。
| 系列 | 动作方式 | 臂开度 | 缸筒内径(mm) |
|---|---|---|---|
| CKZM16-X2800 基本型 | 双作用 | 68º | 16 |
| CKZM16-X2900 串联型 | 双作用 | 68º | 16 |


