











在关键词搜索内找到650项结果。
电动执行器/无杆型防尘・防滴性提高 LEFSW
电动执行器/电缸 » 免电池、绝对增量型编码器电动执行器/电缸 » 环境

| 规格 | 系列 | 行程 (mm) | 可搬运重量 (kg)水平 | 速度 (mm/s) | 丝杠导程 (mm) |
|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机DC24V) | LEFSW16E | 50〜500 | MAX.15 | MAX.700 | 5,10 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LEFSW25E | 50〜800 | MAX.30 | MAX.750 | 6,12,20 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LEFSW32E | 50〜1000 | MAX.50 | MAX.850 | 8,16,24 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LEFSW40E | 150〜1200 | MAX.65 | MAX.800 | 10,20,30 |
对应低GWP冷媒的冷冻式温控器 HRZF
温控器 » 温控器(循环液温控装置)温控器 » 对应氟利昂管制的温控器

-
・对应低GWP冷媒
GWP:148※ ※ IPCC AR4基准
EU冷媒管制:GWP 150以上
美国冷媒管制:GWP 700以上
加利福尼亚州冷媒管制:GWP 750以上
・环境对应冷媒R454C(不可空运)
・采用DC变频冷冻机和变频泵,实现大幅度节能。
| 系列 | 设定温度范围 | 冷却能力 | 温度稳定性 | 冷却方式 | 循环液 |
|---|---|---|---|---|---|
| HRZF010 | -20〜90℃ | 10kW | ±0.1℃ | 水冷冷冻式 | 氟化液 乙二醇60%水溶液 |
薄型气缸/高输出力型 CQE
气缸 » 紧凑型气缸
-
・理论输出高达1.5倍
・外部尺寸与现有的CQ2系列相同
・多边形活塞设计将理论输出力提高了1个等级
・助力压缩空气管路的低压化 供给压力降低0.17MPa
即使降低气缸的供给压力,也能实现相同的理论输出力
| 形式 | 系列 | 动作方式 | 缸径(mm) |
|---|---|---|---|
| 高输出力型 | CQE | 单杆双作用 | φ20,φ32 |
免电池 绝对增量型编码器型
电动执行器/对应集装式控制器
出杆型 LE2Y□H
电动执行器/电缸 » 出杆型/带导杆的出杆型电动执行器/电缸 » 免电池、绝对增量型编码器
电动执行器/电缸 » 集装式控制器/对应集装式控制器电动执行器

-
・对应集装式控制器
・优化电机控制,每年CO2排放量:最多削减38%(与本公司相比)
8.7kg-CO2e/年(14.1)
※数值因动作条件而异。
・带免电池 绝对增量型编码器
可从停止位置重新启动
| 规格 | 系列 | 行程 (mm) | 可搬运重量 (kg)水平 | 速度 (mm/s) | 丝杠导程 (mm) |
|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机DC24V) | LE2Y16□H | 30~300 | 最大40 | 最大700 | 2.5,5,10 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LE2Y25□H | 30~400 | 最大70 | 最大900 | 3,6,12,20 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LE2Y32□H | 50~500 | 最大100 | 最大900 | 4,8,16,24 |
免电池 绝对增量型编码器型
电动执行器/对应集装式控制器
无杆型 LE2FS□H
电动执行器/电缸 » 免电池、绝对增量型编码器电动执行器/电缸 » 集装式控制器/对应集装式控制器电动执行器
-
・对应集装式控制器
最多可连接16轴
・优化电机控制,每年CO2排放量:最多削减38%(与本公司相比)
8.7kg-CO2e/年(14.1)
※数值因动作条件而异。
・带免电池 绝对增量型编码器
可从停止位置重新启动
| 规格 | 系列 | 行程 (mm) | 可搬运重量 (kg)水平 | 速度 (mm/s) | 丝杠导程 (mm) |
|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机DC24V) | LE2FS16□H | 50~500 | 最大18 | 最大800 | 2.5,5,10 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LE2FS25□H | 50~800 | 最大40 | 最大1200 | 3,6,12,20 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LE2FS32□H | 50~1000 | 最大68 | 最大1100 | 4,8,16,24 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LE2FS40□H | 150~1200 | 最大80 | 最大1200 | 5,10,20,30 |
集装式控制器 JXD1-M□
电动执行器/电缸 » 控制器/驱动器电动执行器/电缸 » 集装式控制器/对应集装式控制器电动执行器

-
・最多可连接16轴
最多可连接 8 个驱动单元
・无风扇设计
无冷却风扇,无需担心风扇更换
・使用温度范围 0~55℃
・通信协议
CC-Link
EtherNet/IP™
EtherCAT®
PROFINET®
・所有连接均可从前端接入
| 系列 | 对应电机 | 电源电压 | 通信协议 | 连接执行器 | 驱动单元数量 | 控制轴数 |
|---|---|---|---|---|---|---|
| JXD1-M□ | 免电池 绝对增量型编码器 (步进电机DC24V) | DC24V ±10% | CC-Link EtherNet/IP™ EtherCAT® PROFINET® | LE2□ | 最多8个单元 | 最多16轴 |


多级真空发生器(搭载真空用压力开关 ZSE20A) ZL1/ZL3/ZL6
真空用元件 » 真空发生器、真空泵系统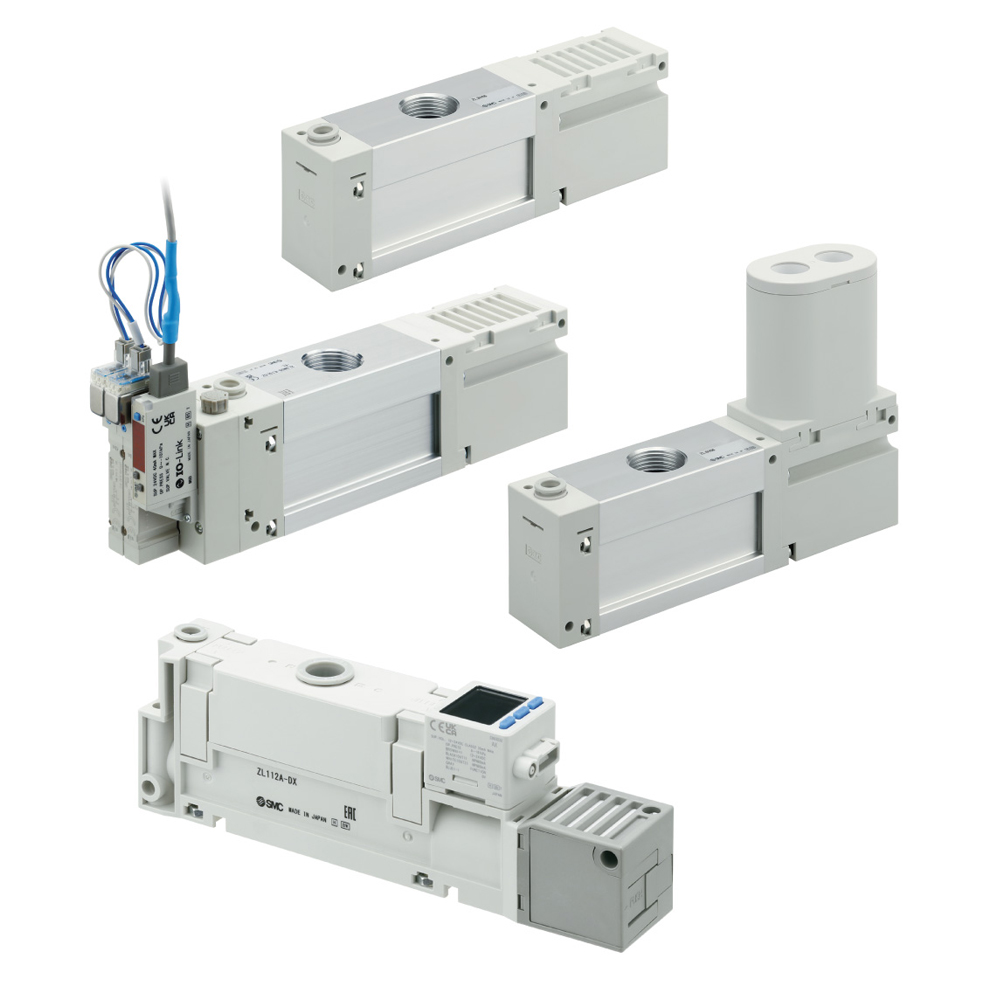
-
・追加对应IO-Link的真空用压力开关(ZL3、ZL6)New
只需一根通信电线,就能控制真空发生器
可读取元件信息并进行参数的统一设定。
・最大吸入流量100/300/600L/min(ANR)3种类型
・空气消耗量减少91% (ZL3、ZL6)
得益于带节能功能的真空压力开关及真空发生器的效率提高
・重量最多减少60%
ZL1:180g←ZL112 (以前产品):450g
※1 分支规格+通口排气时
| 系列 | 喷嘴口径 (mm) | 最大吸入流量 [L/min(ANR)] | 空气消耗量 [L/min(ANR)] |
|---|---|---|---|
| ZL1 | 1.2 | 100 | 57 |
| ZL3M | 1.9 | 300※1 | 150 |
| ZL3H | 1.5 | 300※1 | 135 |
| ZL6M | 1.9×2 | 600※1 | 300 |
| ZL6H | 1.5×2 | 600※1 | 270 |


