








在关键词搜索内找到1,264项结果。
防结露管 IDK
气源处理元件 » 空气干燥器配管&接头 » 管子(氟树脂/洁净型)

| 系列 | 外径/内径(mm) | 有效长度(mm) | 适合管接头 |
|---|---|---|---|
| IDK02 直线型 | 2/1.2 | 100 200 | KQ2 |
| IDK04 直线型 | 4/2.5 | 100 200 | KQ2 |
| IDK06 直线型 | 6/4 | 100 200 | KQ2 |
| IDK04-100-C1 螺旋形 | 4/2.5 | 100 | KQ2 |

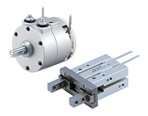
协作机器人用 磁力吸附单元
适合安川电机MOTOMAN-HC MHM-X7400A-DTP/HC10DT/HC10
真空用元件 » 协作机器人用 真空吸附单元协作机器人专用夹爪 » 磁力吸附单元

-
・可通过磁石吸附、保持工件
・对应带孔、有凹凸及复杂形状的工件
・外形紧凑,保持力大
保持力最大200N(ø25、工件厚6mm时)
・切断空气时也能保持工件
・仅需连接1根压缩空气供给管和电线即可工作
・电磁阀、磁性开关、活塞速度调节机构一体化
| 系列 | 最大保持力 N(工件厚度mm) |
|---|---|
| MHM-X7400A-DTP MHM-X7400A-HC10DT MHM-X7400A-HC10 | 160(2) 200(6) |

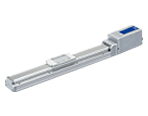
免电池 绝对增量型编码器
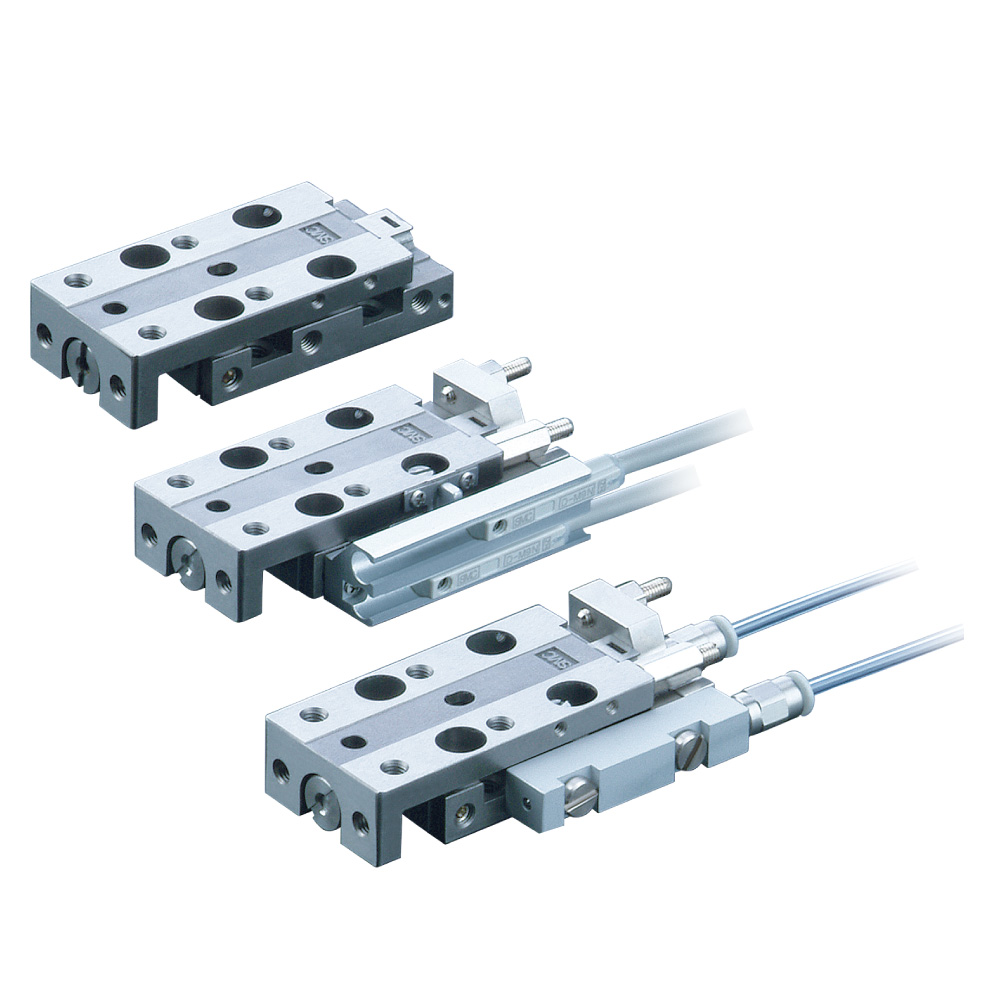
电动滑台/薄型 LES
电动执行器/电缸 » 免电池、绝对增量型编码器
| 规格 | 系列 | 行程 (mm) | 可搬运重量 (kg) 水平 | 可搬运重量 (kg) 垂直 | 速度 (mm/s) | 丝杆导程 (mm) |
|---|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机DC24V) | LES25□ | 30、50、75、100、125、150 | 最大5 | 最大5 | 最大400 | 8、16 |

薄型导杆式带锁气缸 MLGP-Z
气缸 » 带锁气缸
-
・全行程、任何位置都可停止
防止压力降低、残压排气时的落下
・由于导杆缩短、板厚变更、重量最大减轻17%
・导杆 最大缩短22mm(与以前产品MLGPM比较)
・2面均可直接安装小型磁性开关、耐强磁场磁性开关
| 型号 | 轴承 | 系列 | 动作方式 | 缸筒内径(mm) | 锁紧机构 |
|---|---|---|---|---|---|
| 标准型 | 滑动轴承型 | MLGPM | 单杆双作用 | 20,25,32,40 50,63,80,100 | 弹簧锁紧 |
| 标准型 | 滚珠衬套轴承型 | MLGPL | 单杆双作用 | 20,25,32,40 50,63,80,100 | 弹簧锁紧 |