











在关键词搜索内找到9项结果。
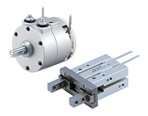
协作机器人专用电动真空夹爪 ZXPE5
协作机器人专用夹爪 » 电动真空夹爪(内置真空泵)电动执行器/电缸 » 协作机器人专用夹爪

-
・无需气源的真空夹爪
・仅需连接电气配线接头即可动作
内置真空泵,可在没有气源的地方使用
・将吸附所需的周边元件单元化
集真空泵、大气开放阀、压力显示器、吸盘于一体
・消耗电流最多削减64%
自动/手动模式,实现节能运行
・轻量:556g
・丰富的吸盘扩展品对应各种各样的工件形状
・安装规格:符合ISO9409-1-50-4-M6
最大吸入流量*1 根据本公司测定条件确定的夹爪运行模式:连续模式下的数值(真空泵连续运行状态)。可能因大气压(天气、海拔等)和测量方法而异。
最大可搬运重量*2 受吸盘直径、安装姿势和工件的限制。本产品请在最大可搬运重量以下使用。如果超过最大可搬运重量吸附・搬运,可能会造成主体故障及工件掉落。
| 系列 | 吸盘形状 | 吸盘直径 | 最大吸入流量*1 [L/min(ANR)] | 最大可搬运重量*2 [Kg] |
|---|---|---|---|---|
| ZXPE5 | 平型 平型带肋 风琴型 薄型 多段风琴型 2.5段风琴型 5.5段风琴型 薄膜包装工件用平型 | φ8~φ32 | 4.5 | 5 |
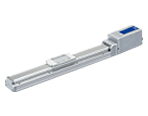
协作机器人用 真空吸附单元
适合发那科 CRX系列 ZXP7□21-X1
真空用元件 » 协作机器人用 真空吸附单元协作机器人专用夹爪 » 真空吸附单元

-
・即插即用
对应FANUC CRX插件软件
・仅需连接1根压缩空气供给管和1根带M8插头的电线即可工作
・真空发生器、供气阀·破坏阀、压力传感器、吸盘一体化设计
・安装规格:依据ISO9409-1-50-4-M6
| 系列 | 吸盘形状 | 吸盘径 | 吸入流量 [L/min(ANR)] | 空气消耗量 [L/min(ANR)] |
|---|---|---|---|---|
| ZXP7□21-X1 | 平型 平型带肋 风琴型 薄型 多级风琴型 2.5级风琴型 5.5级风琴型 | φ8~φ32 | 17 | 57 |
协作机器人用 真空吸附单元
适合三菱电机MELFA ASSISTA ZXP7□-X1□-ASSISTA
真空用元件 » 协作机器人用 真空吸附单元协作机器人专用夹爪 » 真空吸附单元

-
・仅需连接1根压缩空气供给管和1根带M12插头的电线即可工作
・真空发生器、供气阀、压力传感器、吸盘一体化设计
・外观采用为圆弧形状,避免尖角
・有丰富的吸盘扩展品,可对应各种工件
| 系列 | 吸盘形状 | 吸盘径 | 吸入流量 [L/min(ANR)] | 空气消耗量 [L/min(ANR)] |
|---|---|---|---|---|
| ZXP7□-X1□-ASSISTA | 平型 平型带肋 风琴型 薄型 多级风琴型 2.5级风琴型 5.5级风琴型 | φ8~φ32 | 17 | 57 |
协作机器人用 真空吸附单元
适合欧姆龙TECHMAN ROBOT Inc. TM系列 ZXP7□41-X1
真空用元件 » 协作机器人用 真空吸附单元协作机器人专用夹爪 » 真空吸附单元

-
・即插即用
对应TMComponent简易编程
・仅需连接1根压缩空气供给管和1根带M8插头的电线即可工作
・真空发生器、供气阀·破坏阀、压力传感器、吸盘一体化设计
・安装规格:依据ISO9409-1-50-4-M6
| 系列 | 吸盘形状 | 吸盘径 | 吸入流量 [L/min(ANR)] | 空气消耗量 [L/min(ANR)] |
|---|---|---|---|---|
| ZXP7□41-X1 | 平型 平型带肋 风琴型 薄型 多级风琴型 2.5级风琴型 5.5级风琴型 | φ8~φ32 | 17 | 57 |
协作机器人专用真空吸附单元
适合优傲机器人 ZXP7□01-X1
真空用元件 » 协作机器人用 真空吸附单元协作机器人专用夹爪 » 真空吸附单元

-
・即插即用
对应URCap简易编程
・仅需连接1根压缩空气供给管和1根带M8插头的电线即可工作
・真空发生器、供气阀·破坏阀、压力传感器、吸盘一体化设计
・安装规格:依据ISO9409-1-50-4-M6
| 系列 | 吸盘形状 | 吸盘直径 | 吸入流量 [L/min(ANR)] | 空气消耗量 [L/min(ANR)] |
|---|---|---|---|---|
| ZXP7□01-X1 | 平型 平型带肋 风琴型 薄型 多级风琴型 2.5级风琴型 5.5级风琴型 | φ8~φ32 | 17 | 57 |
协作机器人用 真空吸附单元
适合安川电机协作机器人MOTOMAN-HC ZXP7□12-X1□/ZXP7□11-X1□
真空用元件 » 协作机器人用 真空吸附单元协作机器人专用夹爪 » 真空吸附单元

-
・仅需连接1根压缩空气供给管和内置的电线即可工作
・真空发生器、供气阀·破坏阀、压力传感器、吸盘一体化设计
・使用机器人内置的空气配管和电气配线,无需外部配线、配管。对工件和作业者无干涉。
・外观采用为圆弧形状,避免尖角
・豊有丰富的吸盘扩展品,可对应各种工件
| 系列 | 吸盘形状 | 吸盘径 | 吸入流量 [L/min(ANR)] | 空气消耗量 [L/min(ANR)] |
|---|---|---|---|---|
| ZXP7□12-X1□M ZXP7□11-X1□ | 平型 平型带肋 风琴型 薄型 多级风琴型 2.5级风琴型 5.5级风琴型 | φ8~φ32 | 17 | 57 |
协作机器人用 带法兰的真空吸盘
适合卡瓦达机器人、NEXTAGE ZXP7-PFL1-□-X1
真空用元件 » 协作机器人用 真空吸附单元协作机器人专用夹爪 » 真空吸附单元

-
・安装规格:符合ISO9409-1-50-4-M6标准
・无配管
无需向各个吸盘配管,不会与工件或作业者干涉
・外观形状采用无尖角的紧凑圆弧形
・有丰富的吸盘扩展屏,能应对各种各样的工件
・吸盘的数量、安装间距可变更
| 系列 | 吸盘形状 | 吸盘直径 |
|---|---|---|
| ZXP7-PFL1-□-X1 | 平型 平型带肋 风琴型 薄型 多级风琴型 2.5级风琴型 5.5级风琴型 | φ8~φ32 |
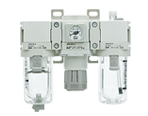
小型压力开关 ZSE2/ISE2
传感器/开关 » 电子式压力开关/压力传感器(传感器、放大器一体型)
| 系列 | 种类 | 设定压力范围 |
|---|---|---|
| ZSE2 | 真空压 | 0~-101kPa |
| ISE2L | 正压 | 0~100kPa |
| ISE2 | 正压 | 0~1MPa |
协作机器人用 磁力吸附单元
适合川崎重工duAro1、2系列 ZXP7□-X1□-KA
真空用元件 » 协作机器人用 真空吸附单元
| 系列 | 吸盘形状 | 吸盘径 | 吸入流量 [L/min(ANR)] | 空气消耗量 [L/min(ANR)] |
|---|---|---|---|---|
| ZXP7□-X1□-KA | 平型 平型带肋 风琴型 薄型 多级风琴型 2、5级风琴型 5、5级风琴型 | φ8~φ32 | 17 | 57 |

