








在关键词搜索内找到1,232项结果。
吸附痕迹对策吸盘 ZP2
真空用元件 » 真空吸盘
| 系列 | 吸盘形状 | 吸盘径(mm) |
|---|---|---|
| ZP2 | 平型 | φ4、φ6、φ8、φ10、φ13、φ16、 φ20、φ25、φ32、φ40、φ50 |
| ZP2 | 高刚性(平型带肋) | φ40、φ50、φ63、φ80、φ100、φ125 |
| ZP2 | 树脂接触件 | 适合吸盘:φ6、φ8、φ10、φ13、 φ16、φ20、φ25、φ32 |

大型真空单元 ZR
真空用元件 » 真空发生器、真空泵系统
-
・对应真空发生器系统/真空泵系统。
・采用模块式设计,可根据所需功能进行组合。
・采用双电磁头,具有自我保持功能。
・可集装化。
・可选择数字式真空开关、电磁阀等功能。
| 系列 | 喷嘴径 (mm) | 最大吸入流量 [L/min(ANR)] | 空气消耗量 [L/min(ANR)] | 适合吸盘 (mm) | 真空泵系统系列 |
|---|---|---|---|---|---|
| ZR110 | 1.0 | 25 | 53 | 2~32 | ZR100 |
| ZR113 | 1.3 | 42 | 86 | 2~50 | ZR100 |
| ZR115 | 1.5 | 63 | 102 | 2~100 | ZR100 |
| ZR118 | 1.8 | 74 | 155 | 2~125 | ZR100 |
| ZR120 | 2.0 | 95 | 194 | 2~150 | ZR100 |
电动执行器/出杆型 LEY
电动执行器/电缸 » 无电机规格
-
・追加了无电机规格,可配置各种伺服电机。
・支持电机
Mitsubishi Electric Corporation, YASKAWA Electric Corporation,
SANYO DENKI CO., LTD., OMRON Corporation, Panasonic Corporation,
FANUC CORPORATION, NIDEC INSTRUMENTS,
KEYENCE CORPORATION, FUJI ELECTRIC CO., LTD., MinebeaMitsumi Inc.,
Shinano Kenshi Co., Ltd., ORIENTAL MOTOR Co., Ltd., FASTECH Co., Ltd.,
Rockwell Automation, Inc. (Allen-Bradley), Beckhoff Automation GmbH,
Siemens AG, Delta Electronics, Inc., ANCA Motion
| 规格 | 系列 | 行程 (mm) | 推压力 (N) | 速度 (mm/s) | 丝杠导程 (mm) |
|---|---|---|---|---|---|
| 无电机 折返型 | LEY25 | 30~400 | 最大485 | 最大900 | 3, 6, 12 |
| 无电机 直线安装型 | LEY25D | 30~400 | 最大485 | 最大900 | 3, 6, 12 |
| 无电机 折返型 | LEY32 | 30~500 | 最大588 | 最大1200 | 4, 8, 16 |
| 无电机 直线安装型 | LEY32D | 30~500 | 最大736 | 最大1000 | 4, 8, 16 |
| 无电机 折返型 | LEY63 | 50~800 | 最大3343 | 最大1000 | 5, 10, 20 |
| 无电机 直线安装型 | LEY63D | 50~800 | 最大1910 | 最大1000 | 5, 10, 20 |
| 无电机 折返型 | LEY100 | 100~1000 | 最大12000 | 最大500 | 10 |
| 无电机 直线安装型 | LEY100D | 100~1000 | 最大12000 | 最大500 | 10 |
AC伺服电机驱动器 LECSA/LECS□-T
电动执行器/电缸 » 控制器/驱动器产业用通信元件/无线系统 » 产业用通信元件 对应PROFINET的元件
产业用通信元件/无线系统 » 产业用通信元件 对应CC-Link的元件
产业用通信元件/无线系统 » 产业用通信元件 对应SSCNET III的元件

-
・脉冲输入型的电机驱动器
・对应电机容量:100W、200W、400W、750W
(仅LECSB-T、LECSC-T、LECSS-T、LECSN□-T支持750W)
・对应编码器:
相对增量型
绝对增量型
・通过自动增益调谐进行伺服调整
・带显示设定功能
・可通过最多255的点表进行定位
| 型号 | 系列 | 对应电机 | 电源电压 | 并联 输入输出 输入点数 | 并联 输入输出 输出点数 |
|---|---|---|---|---|---|
| 脉冲输入型
(相对增量型编码器用) | LECSA | AC伺服电机 (100W/200W/400W) | AC100~120V (50/60Hz) AC200~230V (50/60Hz) | 6点 | 4点 |
| 脉冲输入型/定位型 绝对增量型编码器用) | LECSB-T | AC伺服电机 (100W/200W/400W/750W) | AC200~240V (50/60Hz) | 10点 | 6点 |
| CC-Link直接输入型 (绝对增量型编码器用) | LECSC-T | AC伺服电机 (100W/200W/400W/750W) | AC200~230V (50/60Hz) | ― | ― |
| SSCNETⅢ/H型 (绝对增量型编码器用) | LECSS-T | AC伺服电机 (100W/200W/400W/750W) | AC200~240V (50/60Hz) | ― | ― |
| 网卡型 (绝对增量型编码器用) | LECSN□-T | AC伺服电机 (100W/200W/400W/750W) | AC200~240V (50/60Hz) | ― | ― |
电动执行器/导杆型 电机折返型 LEYG
电动执行器/电缸 » 出杆型/带导杆的出杆型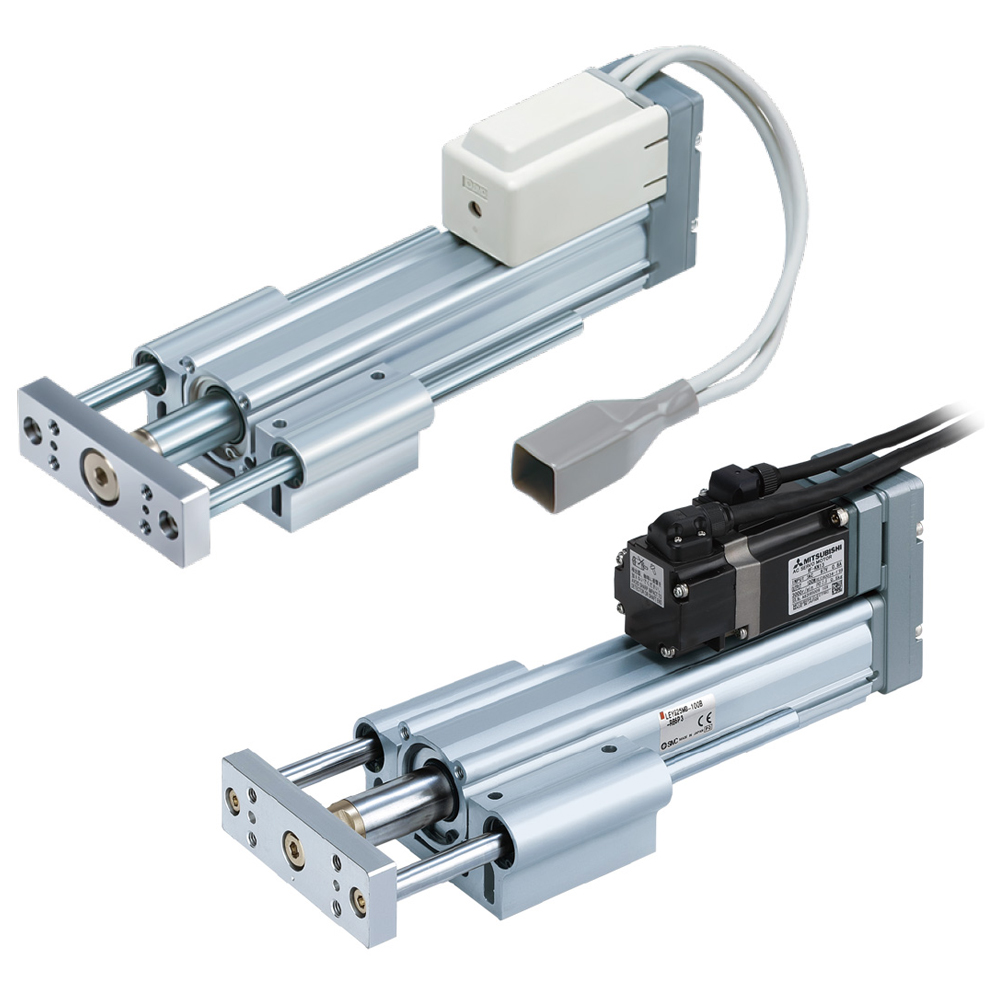
| 规格 | 系列 | 行程 (mm) | 压触推力(N) | 速度 (mm/s) | 丝杠导程 (mm) |
|---|---|---|---|---|---|
| 步进电机 (带编码器DC24V) | LEYG16 | 30~200 | 最大141 | 最大500 | 2.5,5,10 |
| 步进电机 (带编码器DC24V) | LEYG25 | 30~300 | 最大452 | 最大500 | 3,6,12 |
| 步进电机 (带编码器DC24V) | LEYG32 | 30~300 | 最大707 | 最大500 | 4,8,16 |
| 步进电机 (带编码器DC24V) | LEYG40 | 30~300 | 最大1058 | 最大300 | 4,8,16 |
| 伺服电机 (DC24V) | LEYG16A | 30~200 | 最大111 | 最大500 | 2.5,5,10 |
| 伺服电机 (DC24V) | LEYG25A | 30~300 | 最大130 | 最大500 | 3,6,12 |
| AC伺服电机 | LEYG25□S | 30~300 | 最大485 | 最大900 | 3,6,12 |
| AC伺服电机 | LEYG32□S | 30~300 | 最大588 | 最大1200 | 5,10,20 |
电动执行器/高刚性无杆型 滚珠丝杠驱动 LEJS
电动执行器/电缸 » 无杆型
安全注意事项
电动执行器/共通注意事项
电动执行器/单独注意事项
磁性开关/共通注意事项
磁性开关·磁性开关的安装
特长
扩展品
简易选型程序
特定开发品信息
环保认证(RoHS)
CE,UKCA/UL 对应表
系统构成图
| 规格 | 系列 | 行程(mm) | 可搬运 重量 (kg) 水平 | 速度 (mm/s) | 丝杠 导程 (mm) |
|---|---|---|---|---|---|
| AC伺服电机 | LEJS40 | 200~ 1200 | 最大 55 | 最大 1800 | 8,16,24 |
| AC伺服电机 | LEJS63 | 300~ 1500 | 最大 85 | 最大 1800 | 10,20,30 |
免电池 绝对增量型编码器
电动执行器/无杆型 同步带驱动 LEFB
电动执行器/电缸 » 免电池、绝对型增量编码器
安全注意事项
电动执行器/共通注意事项
电动执行器/单独注意事项
磁性开关/共通注意事项
磁性开关·磁性开关的安装
特长
扩展品
简易选型程序
特定开发品信息
环保认证(RoHS)
CE,UKCA/UL 对应表
系统构成图
| 规格 | 系列 | 行程 (mm) | 可搬运重量 (kg) 水平 | 速度 (mm/s) | 丝杆导程 (mm) |
|---|---|---|---|---|---|
| 免电池 绝对增量型编码器 (步进电机DC24V) | LEFB16 | 300~1000 | 1 | 48~1100 | 相当于48 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LEFB25 | 300~2000 | 10 | 48~1400 | 相当于48 |
| 免电池 绝对增量型编码器 (步进电机DC24V) | LEFB32 | 300~2000 | 19 | 48~1500 | 相当于48 |
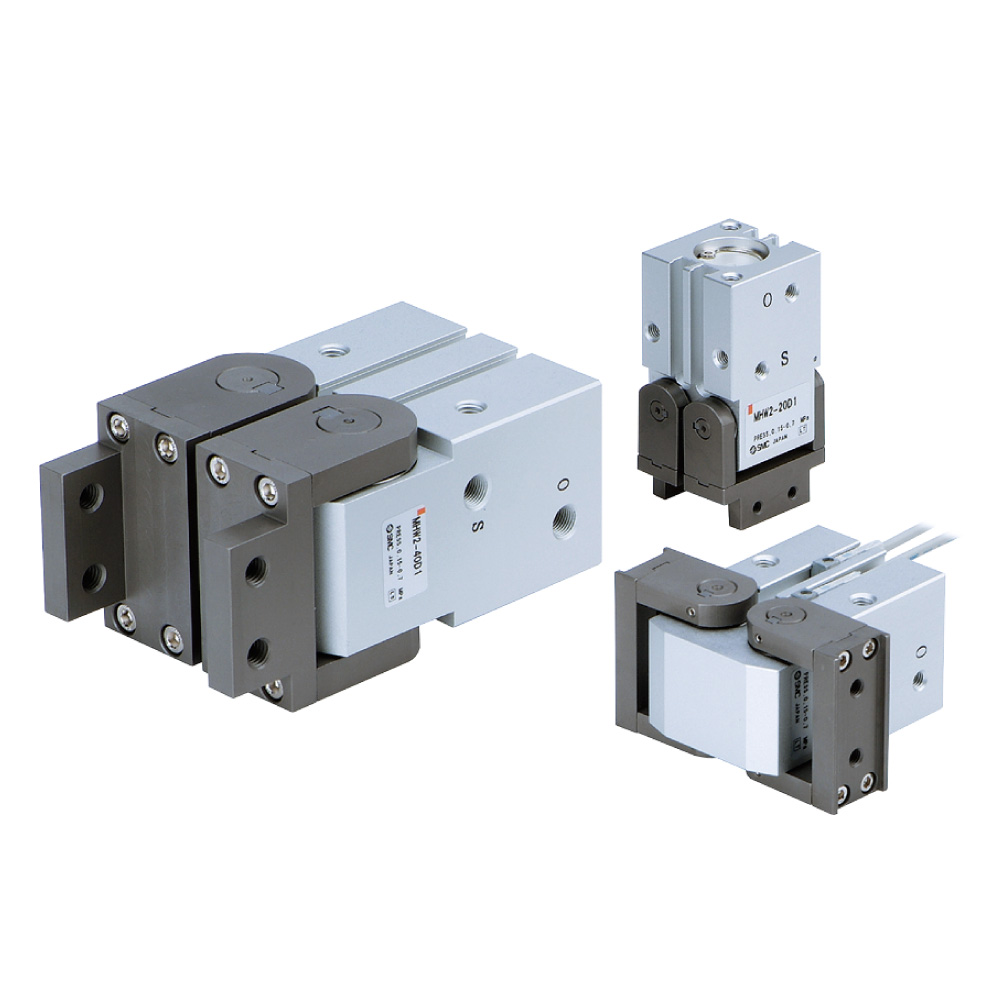
协作机器人用气爪单元(安川电机、MOTOMAN-HC用) JMHZ2-X7400B-DTP/HC10DT/HC10
摆动气缸/气爪 » 协作机器人用气爪
-
・采用空气驱动,体积小、重量轻,夹持力更高
・只需连接1跟供气管和M12电气配线电缆即可工作
・电磁阀、速度调节机构、磁性开关一体化
・导向机构一体化构造,实现高刚性、高精度
采用高精度直线导轨 重复精度:±0.01mm
采用更高等级的直线导轨,刚性提高
・分采用分离式保护罩气爪的维护更容易
| 形式 | 系列 | 缸筒内径(mm) |
|---|---|---|
| 协作机器人用 | JMHZ2-16D-X7400B-DTP JMHZ2-16D-X7400B-HC10DT JMHZ2-16D-X7400B-HC10 | 16 |