产业用机器人行业
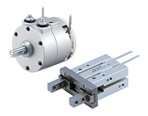
操作机器人 操作用元件
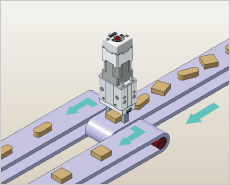
夹持容易发生形变、损坏的部件
・速度控制 ・夹持力控制 ・定位
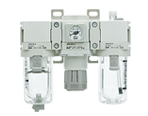
对无序排列的部件进行整理、选别
・识别不同尺寸的工件
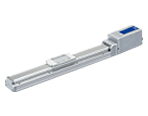
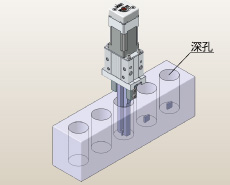
在狭小空间进行夹持
・定位
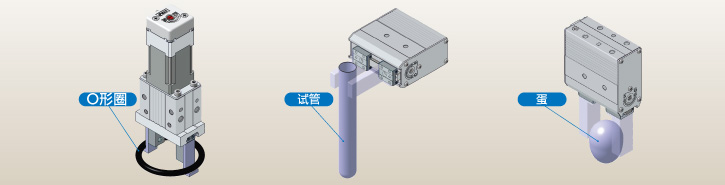
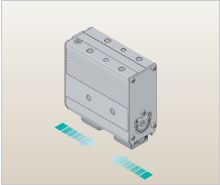
软接触高频率
・速度控制 ・定位 (最小行程)