











Product Information »
WEB Catalog
IN_PROD_346
» Search result
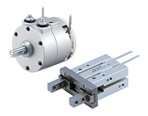
Air Gripper Unit for Collaborative Robots JMHZ2-X7400B
for Universal Robots
Rotary Actuators/Air Grippers » Air Gripper Unit for Collaborative Robots
-
・Plug & play configuration for immediate use
URCap compatible, Easy programming
・Compact, lightweight product with high gripping force due to air operation
Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
・Integrated solenoid valve and speed adjustment mechanism
・Standards: ISO9409-1-50-4-M6
| Type | Series | Cylinder bore size (mm) |
|---|---|---|
| For Collaborative Robots | JMHZ2-16D-X7400B | 16 |
Vacuum Gripper for Collaborative Robots ZXP7□01-X1
for Universal Robots
Vacuum Equipment (Vacuum Generators/Vacuum Suction Cups/Other) » Gripper for Collaborative RobotsAir Gripper for Collaborative Robots » Vacuum Grippers

-
・Plug and Play configuration for immediate use
URCaps compatible Easy programming
・Operate by simply connecting 1 compressed air supply tube and an electrical wiring M8 connector.
・Integrated vacuum ejector, air supply/release valve, pressure sensor, and cups
・Standards: Conforming to ISO9409-1-50-4-M6
Safety Instructions Vacuum Equipment/Precautions Series Variations/Model Selection
Green Procurement (RoHS)
Green Procurement (RoHS)
| Series | Cup form | Cup diameter | Suction flow rate [L/min(ANR)] | Air consumption [L/min(ANR)] |
|---|---|---|---|---|
| ZXP7□01-X1 | Flat Flat with rib Bellows Thin flat Multistage bellows 2.5-stage bellows 5.5-stage bellows | φ8 to φ32 | 17 | 57 |
Magnet Gripper for Collaborative Robots MHM-X7400A
for Universal Robots
Vacuum Equipment (Vacuum Generators/Vacuum Suction Cups/Other) » Gripper for Collaborative RobotsAir Gripper for Collaborative Robots » Magnet Grippers

-
・Plug and Play configuration for immediate use
・URCap: Easy programming
・Attracts and holds heavy objects with a magnet
・Supports workpieces with holes and uneven surfaces
・Compact with high holding force
Holding force: Max. 200 N (ø25, Workpiece thickness 6 mm)
・Continues to hold workpieces even when the air is shut off
・Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
・Integrated solenoid valve, auto switch, and piston speed adjustment mechanism
| Series | Max. holding force N (Workpiece thickness mm) |
|---|---|
| MHM-X7400A | 160(2) 200(6) |
Electric Gripper for Collaborative Robots LEHF32EK2-64-□□-XA147
for Universal Robots
Electric Actuators/Cylinders » Grippers for Collaborative Robots
-
・The positioning, speed, and gripping force can be set.
・Due to the built-in battery-less absolute encoder, a return to origin
operation is not necessary when the power supply is recovered.
・Standards: Conforming to ISO9409-1-50-4-M6
Safety Instructions Electric Actuators/Precautions Simplified Selection Flow Chart Green Procurement (RoHS)
| Type | Series | Opening/Closing stroke [mm] | Gripping force [N] |
|---|---|---|---|
| For collaborative robots | LEHF32EK2-64-□□-XA147 | 64 | 60 to 120 |

