











产品信息 »
新产品信息 类别
新产品信息
Rotary Actuators/ Air Grippers
Compact Position Sensor D-MPG Series


Updated Feb-25
- Detects the stroke position of compact actuators such as air grippers
- Repeatability: 0.1 mm
- Compact sensor head and separate teach unit
- Same shape as the D-M9□ solid state auto switch
- Analog output
- Switch output
- IO-Link compatible
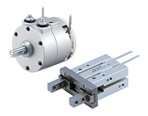
Rotary Actuators CRB/CDRB Series


Updated Jan-25
- A double vane type has been added for sizes 10 to 40. [New]
- Features a compact body with a built-in angle adjustment unit and
auto switch unit (Size: 20, 30, 40)
Overall length: 44% shorter, Weight: 48% lighter - Piping, wiring, and angle adjustment can be performed on the same side for easier mounting.
- Easy-to-adjust start and end positions with the angle adjustment bolts
(as standard) - The position of the chamfered portion of the shaft can be easily checked using the rotating angle indicator. (Only for the CDRB with auto switch)
- Each of the units below for the CRB2 series can be mounted to the CRB series.
Tool Changer/Auto Type RMTA Series

Updated Jan-25
- Robot hand tool automatic exchange
- Standards: ISO9409-1 compliant
Support for direct mounting on collaborative robots - Robot and end tool connection/release
- More compact as flanges are not required.
Direct mounting on collaborative robots eliminates the need for flanges and reduces design labor - Supports a work load of up to 20 kg (Work load: 5 kg, 10 kg, 20 kg)
Tool Changer One-push Type/Clamp Type RMTM Series

Updated Jan-25
- 2 types of manual tool changers
- One-push Type
Tools can be attached/removed by the push of a button (no tools required).
Work load: 10 kg
Repeatability: ±0.01 (Position reproducibility) - Clamp Type
Tools can be attached/removed by clamper bolts (2 pcs).
Work load: 20 kg
Repeatability: ±0.02 (Position reproducibility) - Standards: ISO9409-1-50-4-M6 compliant
Compatible with the flanges of most major collaborative robots - Compact, Lightweight
Magnet Gripper/3-Position Type ø32 MHM-X7776

Updated Dec-24
- Allows for high-speed transfer
Prevents the accidental attraction of a second workpiece and allows for high-speed transfer.
Improved cycle time - Gripper mountable on 3 surfaces (Excludes the port side)
- Stopper (scale) allows for holding force adjustment and improved visibility
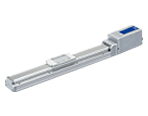
Low Profile Air Gripper MHF2 Series

Updated Nov-24
- ø25 and ø32 have been added. [New]
High rigidity, Gripping point distance: Max. 170 mm (For ø32, at 0.4 MPa) - Height: Max. 66% reducti
Moment reduction when transferring workpieces
72.8 mm → 25 mm(Comparison with our MHZ2 Series equivalent gripping force products) - 3 types of strokes available for each size
Short stroke, Medium stroke, Long stroke
Multi Hand Adapter RMMA Series

Updated Mar-24
- Allows for the handling of various workpieces by a single robot
- Allows for the simultaneous transfer of multiple workpieces
- Up to 3 grippers can be mounted.
- Reduces tool changing time
- Robot arm end standards: Equivalent to ISO9409-1-50-4-M6
- 3 gripper mounting angles
Elastic Finger MH-X7654

Updated Feb-24
- Rubber sheet fingers enable gripping of an indefinite workpiece
- Design of the finger according to the workpiece shape is not required.
- Allows for gripping of tightly packed workpieces
The elastic finger mounting attachment to be produced by the customer. - Material
・Silicone rubber (Blue)
This product is made of materials compliant with FDA
(U.S. Food and Drug Administration) regulations
as well as Japan Food Sanitation Act standards.
・EPDM (Black)
Analog Auto Switch and Display Sensor Monitor D-MH1□ Series


Updated Feb-24
- Outputs the analog voltage according to the actuator stroke position
- A single switch can discriminate between max. 3 position points.
Repeatability: ±20 mV (Converted stroke ±0.1 mm)
Discriminable dimensional difference: 0.2 mm
∗ The value is in the high-resolution range. The converted stroke value varies depending on the actuator.
∗ For air grippers, this is the value for one side of the finger. When it is converted to the dimension of the workpiece to be gripped, the value is doubled. - Detection position display and setting away from the actuator are possible.
- Analog voltage output (1 to 5 V)
Can also be used with the analog auto switch single unit - Reduced setting labor
No need to fine-tune the switch mounting position
Easy adjustment even in narrow places and on moving parts - Improved productivity
・Gripper fully open R gripping R gripping failure detection
・Minimized lead wire disconnection risk - Preventive maintenance
・Display of gripper finger wear
・Visualization of daily inspections (Origin position/ Gripping position)
Grippers for Collaborative Robots ZXP7-PFL1-□-X1, JMHZ2-X7500-KR for KAWADA ROBOTICS CORPORATION, NEXTAGE

Updated Feb-23
- Standards: Conforming to ISO9409-1-50-4-M6
- Tube-less piping
Individual piping to suction cups is unnecessary and there is no interference with workpieces or operators - A wide variety of cup variations are available to support a wide range of workpieces.
- Compact, lightweight product with high gripping force due to air operation
- An air gripper that realizes high rigidity and high precision due to its guide-integrated construction
- With high-precision linear guide
- Repeatability: ±0.01 mm
- Standards: Conforming to ISO9409-1-50-4-M6
Cups with Flange
Air Gripper
